
Hi all,
in the rigid body simulation I'm writing I'm using the Separating Axis Theorem to detect if two object overlaps in the next time step. I approximate the future object position using only the linear velocity. In this way I avoid to run the whole simulation. The aim is detect a collision just BEFORE it happens and NEVER allows objects to overlap.
Then I ran into the case reported in figure and I don't know how to handle it (I hope the image is clear).
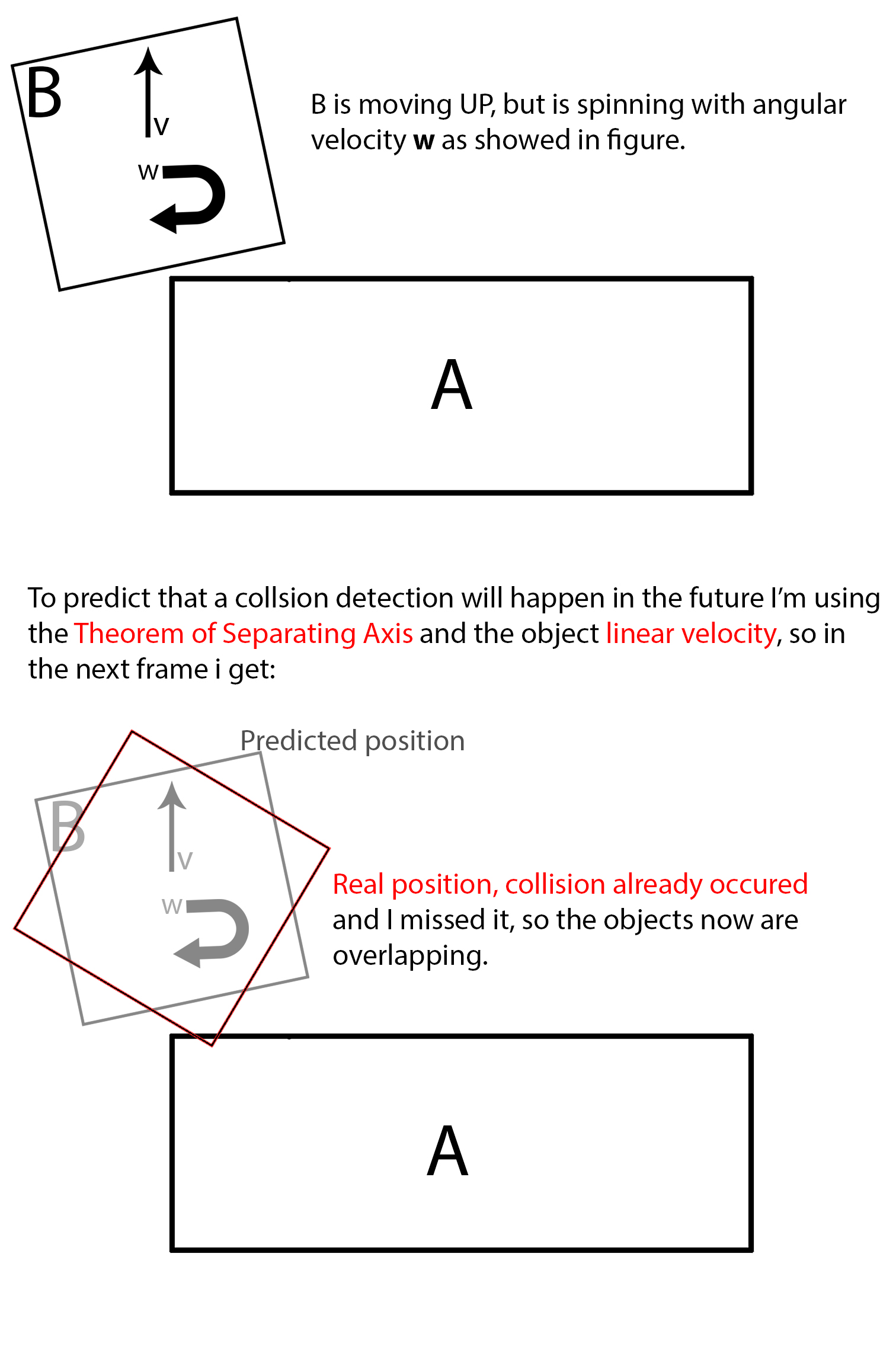
The problem here is than there is no linear velocity component towards the object A.
For reference, I'm following Game Phisics by Heberly. I do not implemented any method to recovery from a situation when two objects already overlap, indeed in the book it is described as unnecessary due the collision are detected before they happen. Am I missing something ? Thank you



