
I have a voxel game, where in 3d space, voxels can be added or removed.
Because these voxels can be moved as a whole, I keep connected voxels in an assembly structure.
My issue comes when I delete a voxel, essentially splitting an assembly into two separate assemblies.
I need a way to determine if any of the adjacent voxels to the one deleted, are still in the same assembly, or if a new assembly needs to be created.
I am using only 6 directions, forward, back, left, right, up, down.
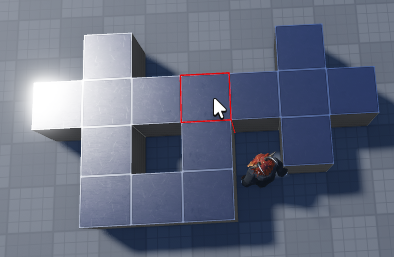
This is the original assembly, the voxel highlighted in red is the one I plan to delete

Once the voxel is removed, the void is surrounded by 3 voxels that could potentially be a new assembly, A B and C
Logically we can see that voxel A and B will still be part of the original assembly, but voxel C, and the ones connected to it, will need to be part of a new assembly.
At first I thought of making a list of new assembly contenders (A,B and C) then doing a 3d flood fill starting with A, and checking to see if that flood fill would eventually land on the spot of B or C, if it did, remove it from the list of contenders for a new assembly, then repeat for all remaining voxels on the list of contenders.
Then, I though… maybe there is a faster way, by instead using a path finding algorithm, to see if there is a valid path between the points of A, B and C, sort of like the flood fill method, I get a list of contenders, and starting with the first in the list A, try to find a path to B, then C, if any path is found, remove that voxel from the list.

So… I ask, which method would be less expensive, as I would like to do this in real time, with rather large assemblies.
and where would I even find good algorithms to do this.
I tried to look up 3d flood fill, but didn't really find any good results.
I also looked up some path finding algorithms, but again, they all seem to be for 2D implementations, and not really any luck finding things for 3d.
Thanks in advance for any help.





