
Latest vehiclephysics Activity

Since brake torque should always be something like -k_brake*angularVelocity * brakeInput, with k_brake a constant > 0, 0< brakeInput < 1, brake torque will always be the opposite sign ov angular velocity, you don’t need those abs() and sign(), getting rid of them will make your code easier…

SiriusT987 said:
do split the input torque from the engine into two equal parts, but that’s it,
So, that's a locked differential ?
Your suspension values seem ok, but the damping could be higher, and don't forget that stiff rear suspension causes oversteer.
Also it's worth considering to separate the b…
@bmarci I will have a look at these websites also my physics simulation runs at 250 fps so I guess I'm in the ballpark of what you suggested. Also, I want to thank you for the continuous help with vehicle physics they can get tricky, especially at this stage.
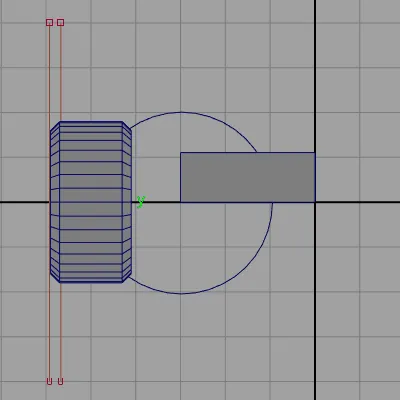
I was wondering if anyone has some good methods for visualizing wheel rotation using torque value. I Have tried a few different methods from this forum and a couple of others and most of the examples shown don't show much of the formula making it difficult to implement.
This is one method I found to…
taby said:
This is fascinating. Any code that you can spare?
If you are fancy about sim coding, you'll find some material here: http://racer.nl
Sources